Qualityokary hilli özbaşdak hereket edýän RGV demir ýol ulagly robot öndüriji






Biziň işimiz wepalylyk bilen işlemegi, ähli müşderilerimize hyzmat etmegi we ýokary hilli özbaşdak hereket edýän RGV demir ýol ulagly robot öndüriji üçin täze tehnologiýada we täze enjamda yzygiderli işlemegi maksat edinýär, ýokary hilli zawodyň gündelik durmuşy, müşderileriň islegine üns beriň Guramanyň ýaşamagynyň we öňe gidişliginiň çeşmesi, biz gelşiňize garaşyp, iş garaýşyny ýerine ýetirip, dogruçyllyga we ak ýüreklilige eýerýäris!
Biziň işimiz wepaly işlemegi, ähli müşderilerimize hyzmat etmegi we täze tehnologiýa we täze enjamda yzygiderli işlemegi maksat edinýärHytaý demir ýol ulagy RGV, Önümleriň optimal berkligini we ygtybarlylygyny üpjün edýän bu önümleri gaýtadan işlemek üçin has ýokary mehanizme eýerýäris. Müşderilerimiz üçin deňsiz-taýsyz önüm hödürlemäge mümkinçilik berýän iň soňky täsirli ýuwmak we düzeltmek amallaryna eýerýäris. Kämillik üçin elmydama çalyşýarys we ähli tagallalarymyz müşderiniň doly kanagatlanmagyna gönükdirilendir.
beýany
RGV-ler çig mallary, taýýar önümleri ýa-da önümçilik zawodynyň içinde gurallary daşamak üçin relslerde öňünden kesgitlenen ýoldan hereket edýän awtomatiki ulaglardyr. Örän köp taraply we birnäçe ýüz kilogramdan birnäçe tonna çenli ýük daşap bilýär.
RGV-ler özbaşdak işleýär, howply ýerlerde howpsuz gezýär, dürli ýükleri göterýär we minimal tehniki hyzmaty talap edýär. Bu giň peýdalaryň hemmesi önümçilik çykdajylarynyň ep-esli peselmegine we öndürijiligiň ýokarlanmagyna getirýär.
Üstünlik
• Awtomatiki gämi gatnawy
RGV-leriň esasy artykmaçlyklaryndan biri, özbaşdak işlemek ukybydyr. Programmirlenensoň, RGV-ler gije-gündiziň dowamynda material işleýşini üpjün edip, adam päsgel bermezden zawodda aýlanýarlar. Awtomatlaşdyrylan ulgam adam ýalňyşlyklaryny aradan aýyrýar we el zähmetine bolan zerurlygy azaldýar, bu bolsa tygşytlamaga we netijeliligiň ýokarlanmagyna getirýär.
• ÜPJÜNÇILIK SENSOR TEHNOLOGI .ASY
RGV-ler öz ýollarynda gezmäge, päsgelçilikleri ýüze çykarmaga we üýtgeýän ýagdaýlara jogap bermäge kömek edýän ösen datçik tehnologiýasy bilen enjamlaşdyrylandyr. RGV-ler tarapyndan üpjün edilýän ýokary awtomatlaşdyrma, adam operatorlary üçin ýaramly howply şertlerde işlemegini üpjün edýär.
• ÖSÜŞ ÖNÜMLERI
Önümçilik zawodlary, RGV-leriň durmuşa geçirilmegi bilen önümçilik sikllerini tamamlamak üçin sarp edilýän wagty azaldyp, kuwwaty ulanmagyň ep-esli ýokarlanandygyny gördi. Maddy taýdan işlemegiň ygtybarly we täsirli usulyny hödürleýärler, bu bolsa önümçilik prosesiniň gowulaşmagyna getirýär.
• HOWPSUZlyk
RGV tehnologiýasyny kabul etmek önümçilik zawodlaryna zähmet zähmet çykdajylaryny azaltmaga we has ygtybarly, has netijeli we tertipli iş gurşawyny döretmäge mümkinçilik berýär. Ösen sensor we awtomatlaşdyryş tehnologiýasy, iň az adam gatyşmagy bilen önümçilik prosesiniň optimallaşdyrylmagyny üpjün edýär.

Arza
Mehaniki önümçilige zerurlyk, gurallary kämilleşdirmegi we üýtgetmegi dowam etdirýär. Maşyn öndürmek, awtoulag öndürmek, harby senagat, gämi gurluşygy we beýleki pudaklar üçin RGV, iş bölegini daşamaly, materiallar we harytlar aňsatlyk bilen daşalyp bilner.

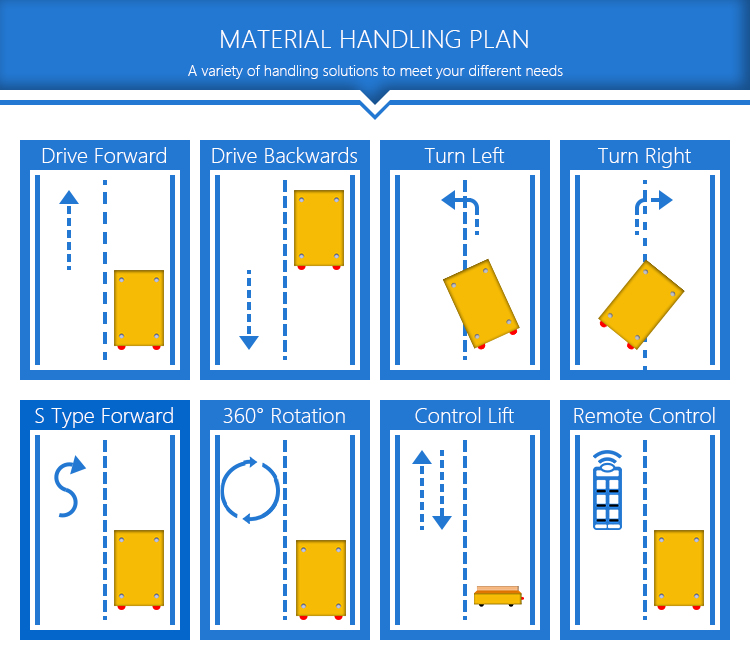
Işlemegiň usullary
Kompaniýa bilen tanyşdyryň
Material işleýiş enjamlary dizaýneri
BEFANBY bu ugur bilen 1953-nji ýyldan bäri meşgullanýar
+
ARYL Kepillik
+
Patentler
+
EKSPORT OUURTLAR
+
ARYL ÜÇIN GEL. .R
TASLAMASY aboutYZ BARADA gürleşip başlalyň
Qualityokary hilli öz-özi hereket edýän RGV demir ýol hereketlendiriji robot (Demir ýol ulaglary) çäkli çäkde (zawod ýa-da ammar ýaly) kiçijik ýükleri (adatça birnäçe tonnadan az) keseligine daşamak üçin niýetlenen demir ýol bilen işleýän enjamlaryň bir görnüşidir. ). “Awtomat” diýilýär, sebäbi deslapky kesgitlenen ugurlary ýa-da buýruklary ýerine ýetirmek üçin datçikleri, dolandyryş ulgamlaryny we programmirlemäni ulanyp, bortdaky adam operatory bolmazdan özbaşdak hereket edip bilýär. Oňa “demir ýol geçirijisi” hem diýilýär, sebäbi pola ýerleşdirilip ýa-da üstünde ýerleşdirilip, arabanyň rahat we takyk hereket etmegine mümkinçilik berýän relslerde işleýär.
RGV, adatça, dört tigirli ýa-da rulonly, iki tarapynda iki sany gönüburçly çarçuwa bolup, egri ýa-da öwrümlere sazlamak üçin aýlanyp ýa-da süýşüp bilýär. Adatça ýük, ýüküň ululygyna we görnüşine laýyklaşdyrylyp bilinýän tekiz platforma ýa-da tarelka ýerleşdirilýär. RGV, programmanyň aýratyn talaplaryna baglylykda batareýalar, elektrik hereketlendirijileri ýa-da pnewmatik ulgamlar ýaly dürli usullar bilen işledilip bilner. Şeýle hem, işleýşini we netijeliligini ýokarlandyrmak üçin liftler, konweýerler, datçikler ýa-da howpsuzlyk enjamlary ýaly goşmaça aýratynlyklar bilen enjamlaşdyrylyp bilner.
Umuman aýdanyňda, ýokary hilli öz-özi hereketlendirýän RGV demir ýol ulagly robot desganyň içinde ownuk ýükleri daşamak, el bilen zähmeti azaltmak, kosmosdan peýdalanmagy optimallaşdyrmak we öndürijiligi we howpsuzlygy ýokarlandyrmak üçin çeýe, ygtybarly we tygşytly çözgüt berip biler.
Biziň işimiz wepalylyk bilen işlemegi, ähli müşderilerimize hyzmat etmegi we ýokary hilli öz-özi hereket edýän RGV demir ýol hereketlendiriji awtoulag öndürijisi üçin yzygiderli täze tehnologiýada we täze enjamda işlemegi maksat edinýär, ýokary hilli zawodyň gündelik durmuşy, müşderileriň islegine üns beriň Guramanyň ýaşamagynyň we öňe gidişliginiň çeşmesi, biz gelşiňize garaşyp, iş garaýşyny ýerine ýetirip, dogruçyllyga we ak ýüreklilige eýerýäris!
Qualityokary hilli hereketlendiriji RGV demir ýol hereketlendiriji robot, önümleriň optimal berkligini we ygtybarlylygyny üpjün edýän bu önümleri gaýtadan işlemek üçin has ýokary mehanizme eýerýäris. Müşderilerimiz üçin deňsiz-taýsyz önüm hödürlemäge mümkinçilik berýän iň soňky täsirli ýuwmak we düzeltmek amallaryna eýerýäris. Kämillik üçin elmydama çalyşýarys we ähli tagallalarymyz müşderiniň doly kanagatlanmagyna gönükdirilendir.












