Agyr kuwwatly demir ýol batareýa zawody RGV robot





Funksiýa aýratynlyklary:
1. Uly zawodlarda tehnika we enjam bolsun, agyr gurluşyk materiallary bolsun, material işleýän ulaglar durnukly daşap bilerler we logistika işine netijeli goldaw berip bilerler.
2. trackollary goýmak: Ulagyň durnuklylygyny we deňagramlylygyny üpjün etmek üçin material işleýän ulaglar, adatça ulanylýan ýerinde yz goýmaly bolýarlar. Trackol gowy görkezme berip biler, iş wagtynda ulagy has durnuklaşdyryp biler we harytlara zeper ýetmeginden we işgärlere şikes ýetmeginiň öňüni alyp biler.

3. Uzakdan dolandyryş amaly: Material işleýän ulaglar köplenç uzakdan dolandyrmak amalyny kabul edýärler we operator uzakdan dolandyrmak arkaly ulagy dolandyryp biler. Bu dizaýn, işi has amatly edýär we işgärleriň howpsuzlygyny üpjün etmek bilen iş netijeliligini ýokarlandyryp biler. Şol bir wagtyň özünde, ulag, iş prosesiniň howpsuzlygyny üpjün etmek üçin eşidilýän we wizual duýduryş ulgamy bilen hem üpjün edilip bilner.
4. Birnäçe nawigasiýa usuly: Material işleýän ulag köp nawigasiýa usullaryny goldaýar we degişli nawigasiýa re modeimi belli bir ýagdaýa görä saýlanyp bilner. Mysal üçin, lazer nawigasiýa ulgamynyň üsti bilen awtomatiki ýol görkezilip bilner, ýa-da ulagyň sürüp barýarka çaknyşyklardan we heläkçiliklerden gaça durmagyny üpjün etmek üçin daş-töweregi duýmak üçin datçikler ulanylyp bilner.
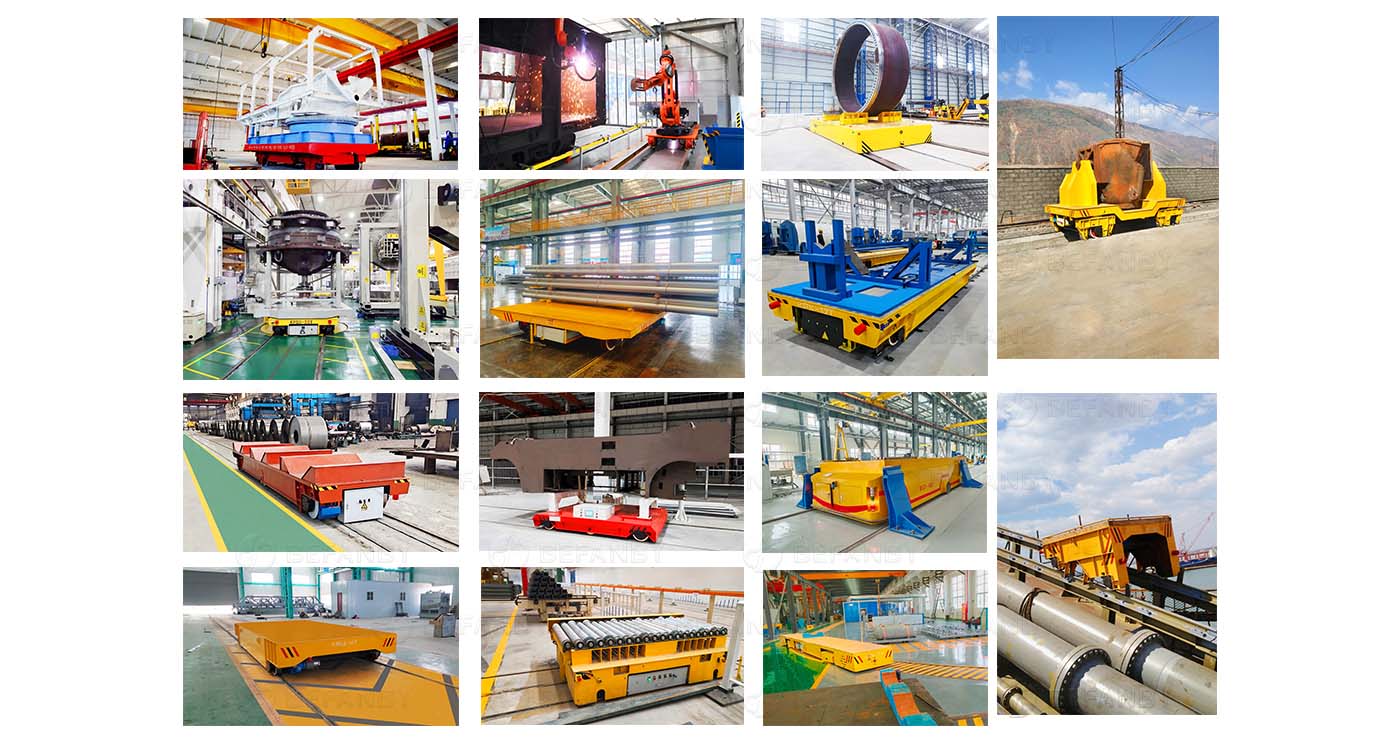
5. Custöriteleşdirilen hyzmatlar: Dürli müşderileriň isleglerini kanagatlandyrmak üçin material işleýän ulaglar özleşdirilip bilner. Müşderiler öz isleglerine görä mümkinçilikleri we goşmaça funksiýalary göterip, dürli ululyklary saýlap bilerler. Hünärmen tehniki topar, enjamlaryň kadaly işlemegini we müşderiniň kanagatlanmagyny üpjün etmek üçin müşderiniň talaplaryna laýyklykda satuwdan soň hyzmat eder.

Üstünlik derňewi:
Logistikanyň netijeliligini ýokarlandyrmak: Material işleýän ulaglaryň peýda bolmagy logistika prosesini has netijeli edýär. Köp mukdarda agyr ýük göterip biler, el bilen işlemegiň wagtyny we zähmet güýjüni azaldyp, logistika netijeliligini ýokarlandyryp biler. Şol bir wagtyň özünde, akylly nawigasiýa ulgamy sürüjilik ugurlaryny optimallaşdyryp, dyknyşyklardan we gijikdirmelerden gaça durup we logistika tizligini hasam gowulandyryp biler.

Müşderini özleşdirmek zerurlyklaryny kanagatlandyryň: Dürli müşderileriň ulaglary material bilen işlemek üçin dürli zerurlyklary bar. Käbirleri has uly ýük göterijiligini talap edip biler, beýlekiler has ýokary takyklygy we durnuklylygy talap edip biler. Materiallary gaýtadan işleýän ulaglary özleşdirmek, bu zerurlyklary kanagatlandyryp, müşderiniň talaplaryna laýyklykda dizaýn we önümçilik, enjamyň müşderiniň isleglerine doly laýyk gelmegini üpjün edip biler.
Jemläp aýtsak, agyr ýük önümlerini netijeli daşamak, akylly nawigasiýa we ýöriteleşdirilen hyzmatlar ýaly funksional aýratynlyklary sebäpli häzirki zaman logistika pudagynda material işleýän ulaglar zerur enjamlara öwrüldi. Diňe logistika netijeliligini ýokarlandyrmak we zähmet çykdajylaryny azaltmak bilen çäklenmän, dürli müşderileriň özleşdirilen isleglerini hem kanagatlandyryp biler. Maddy taýdan işleýän ulaglaryň peýda bolmagy logistika pudagynyň ösüşine hasam kömek eder.
ARYL Kepillik
Patentler
EKSPORT OUURTLAR
ARYL ÜÇIN GEL. .R
Degişli önümler
-

Partlama garşy süýşýän liniýa demir ýol geçelgesi ...
-

5 tonna ussahanada elektrik gaýçy göteriji geçiriş ...
-

1 tonna kabel deprek önümçilik liniýa rolikleri Transf ...
-

20 tonna ýöriteleşdirilen batareýa elektrik demir ýol geçirijisi T ...
-

Zawodda elektrik demirýol platformasynyň geçiriş arabasy ýok
-

20T guýma polat tigirleri göteriji parom batareýasy ...












